Loading...

Moogle Fallback Refresher - July week#4
Quiz by Jane Oliveros
Tag the questions with any skills you have. Your dashboard will track each student's mastery of each skill.
Is this marking correct?
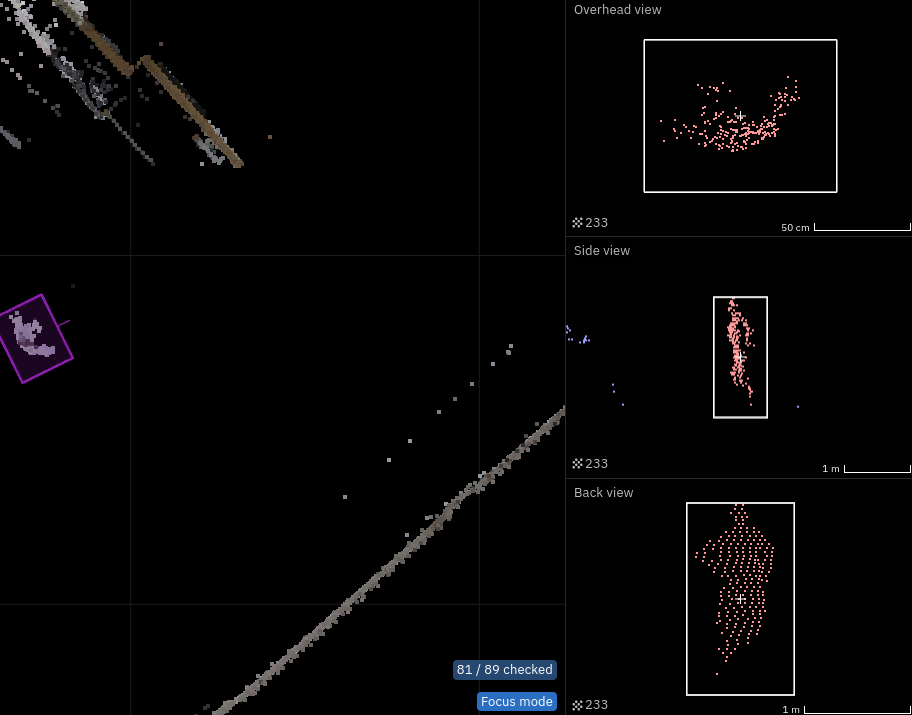
No, the facing of the object is in the wrong direction.
No, the size of the cuboid is inaccurate.
Yes, a 10% accuracy tolerance is shown in the object.
No, it should be tagged as a ppmv.
Is this marking incorrect?
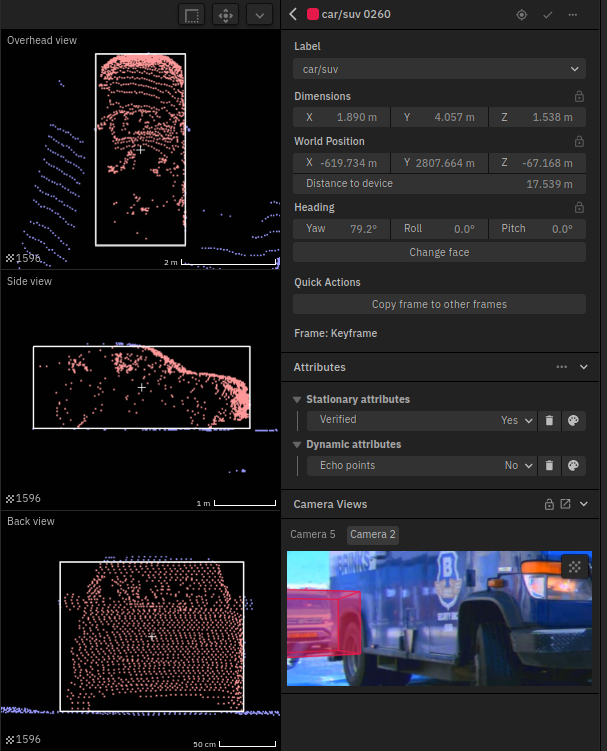
No, cuboids with verified=yes attributes should be tagged accurately.
No, cuboids with 10% inaccuracies considered minor are still acceptable.
Yes, cuboids with verified=yes attributes should be tagged accurately.
Yes, cuboids with 10% inaccuracies considered minor are not acceptable.
Is this marking correct?
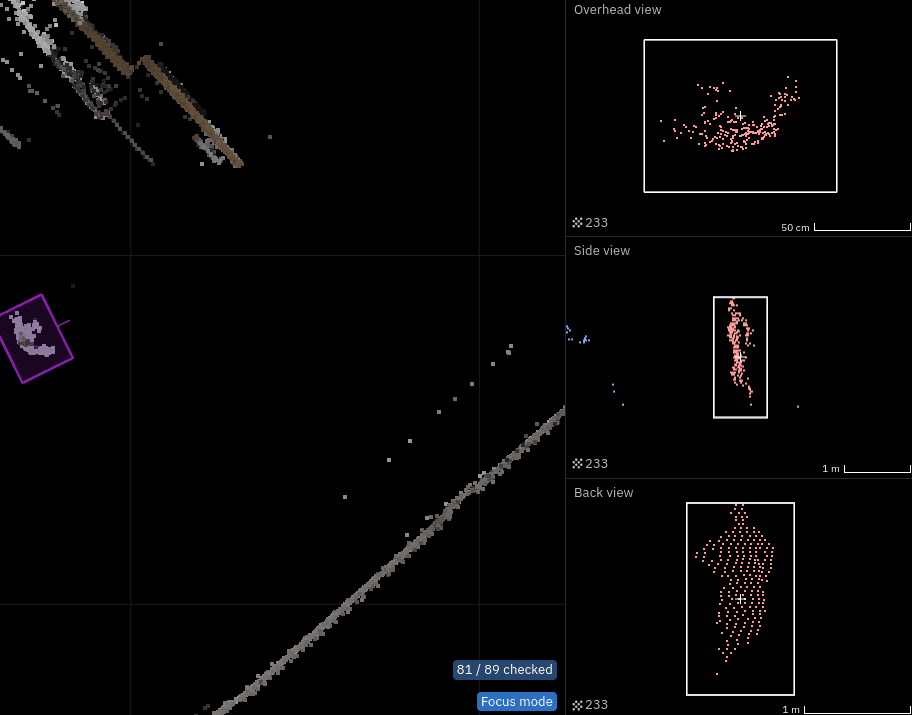
Is this marking incorrect?

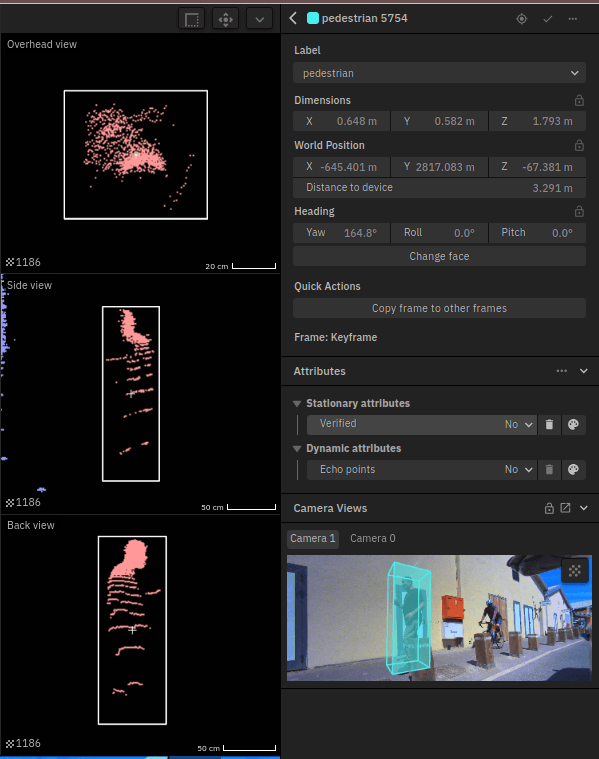
What should be the correct label for this object?

Is this marking incorrect?

When tagging verified=no object it should be as accurate as the same figure of the object. Is this marking correct?
In case you have the lidar points for an object covering only two dimensions, you have no data on the object’s third dimension, you should annotate the object as “False” with the attribute “_______________________”
Which of the following is accepted with 10% tolerance inaccuracy?
In the Self-checking method, when checking in the camera view you must focus on relevant objects that can be seen in the camera. What issue can you see in the image below?

Some of the object has drift points and must exclude that in the cuboid. What is wrong with the image below?

Bicycles that are parked near other bicycles or tied to another object should be tagged as what label?

What should be the correct LABEL for this object if it has a pre-labeled cuboid?

In case of Pedestrians, the heading will be set according to general direction of the body, even the head/face of the Pedestrian looking in different direction.
If a system result cuboid does not require any accuracy adjustments, and the only change required is to set the cuboid as static instead of dynamic, please label the cuboid as verified = '____'
In the intersection scenarios, in any case, the annotator receives a pre-labeled object of a vehicle that didn't move throughout the task, and the system predicts it as stationary, you will just leave it as it is.
In the intersection/traffic scenarios, in any case, the annotator receives a pre-labeled object of a vehicle and it didn't move throughout the task, you will tag it as dynamic only in frames that have 30 or more lidar points.