Loading...
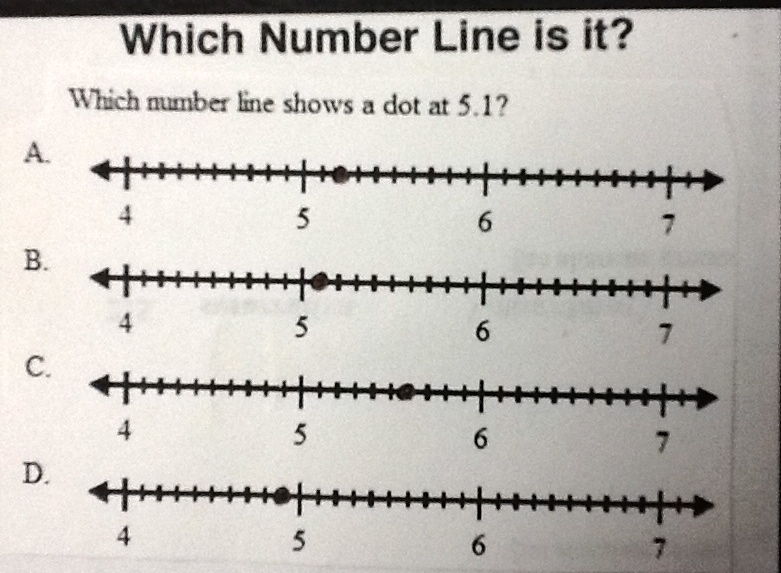
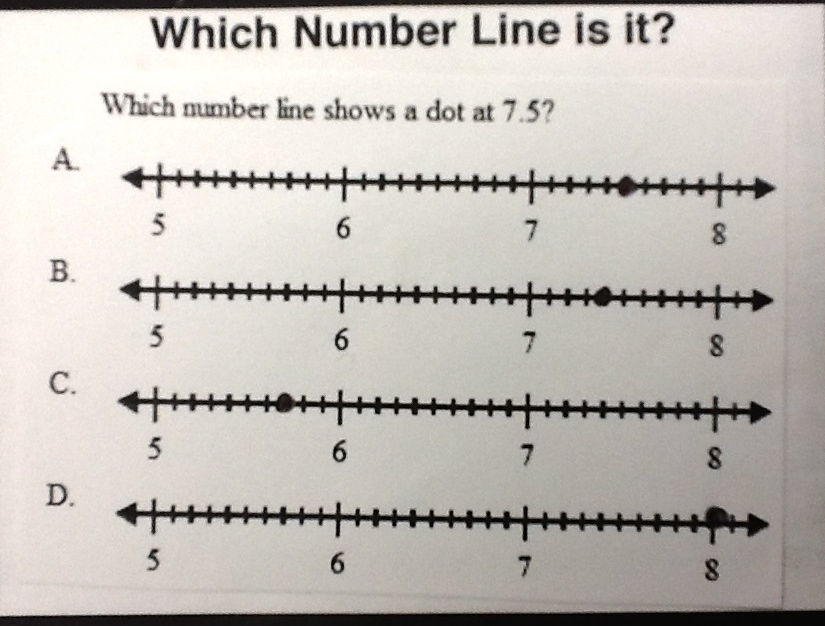
Which number line is it? 25Q
Quiz by Lady OfTarth
Customize this quiz to suit your class
Instantly translate to 100+ languages
Tag the questions with any skills you have. Your dashboard will track each student's mastery of each skill.
Give this quiz to my class