Loading...
LANE TYPE 2nd ITERATION QUIZ
Quiz by Mark Lester Diacos
Tag the questions with any skills you have. Your dashboard will track each student's mastery of each skill.
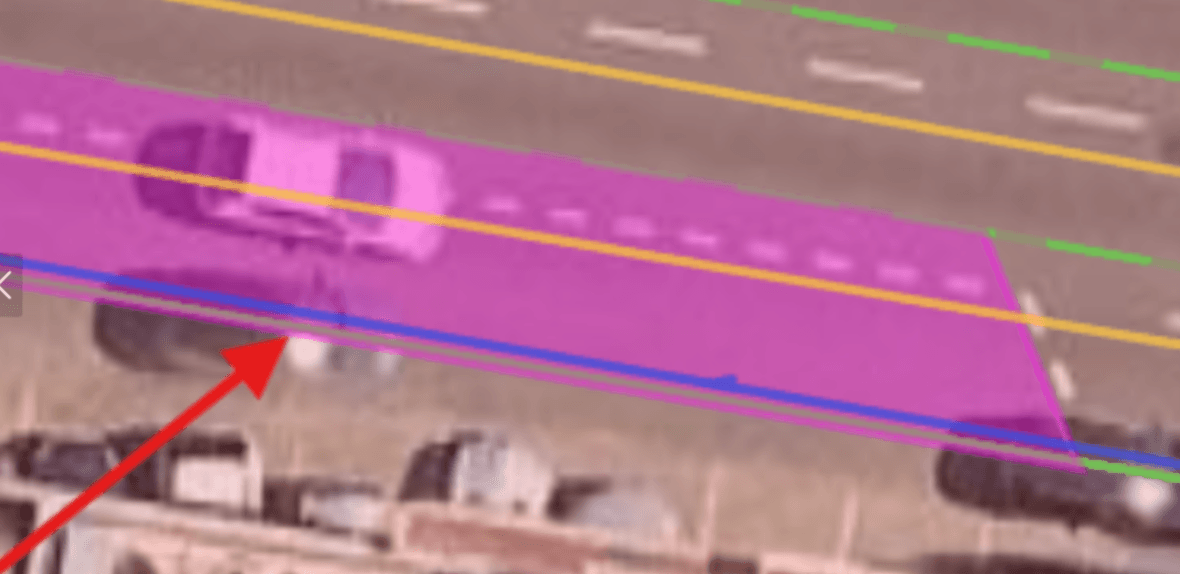
If a Road Edge (RE) and a Lane Mark (LM) are close to each other, and the LM extends over the RE, what is the best approach to ensure accurate polygon tagging?

Create a new boundary that combines both the Lane Mark (LM) and Road Edge (RE) without prioritizing either.
Always prioritize the Lane Mark (LM) over the Road Edge (RE), since it is more visible.
Ignore the Road Edge (RE) and only follow the Lane Mark (LM) for polygon tagging.
Connect from the Lane Mark (LM) to the Road Edge (RE), as the RE represents the true boundary of the road.
When determining whether a neighboring lane is on the left or right, what factor should be ignored, and what should be considered instead?
If a Road Edge (RE) and a Lane Mark (LM) are close to each other, and the LM extends over the RE, what is the best approach to ensure accurate polygon tagging?
If there is no visible lane mark or road indication, but Google Maps clearly identifies the area as a bus stop, what is the correct approach for tagging?

For "deceleration" and "acceleration" cases in the example picture provided, should we tag them even if they are not part of an orange background or a highway/motorway?
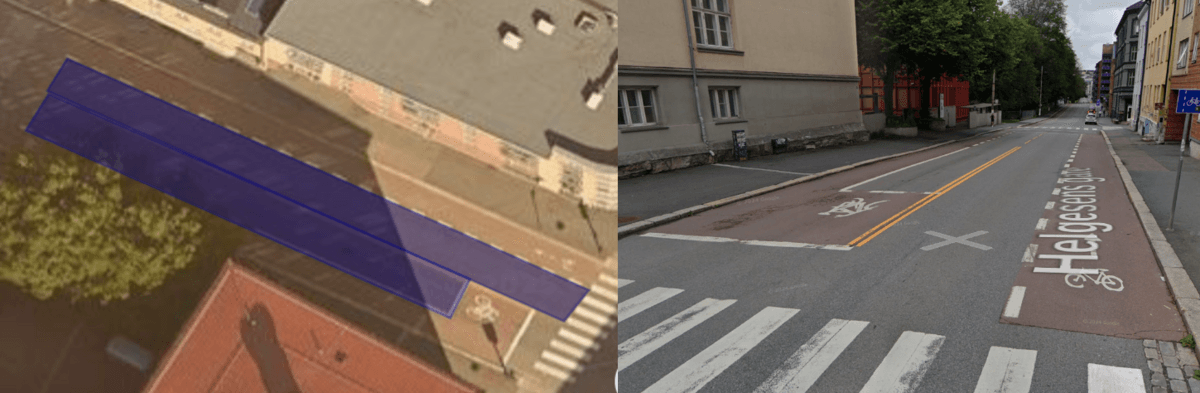
Which type of lane allows access to bicycles as well as other vehicles and requires the inclusion of DrivablePathSpline (DPs).
Which lanes do we classify as Neighbor on the Right or Left, and which ones are considered normal lanes?
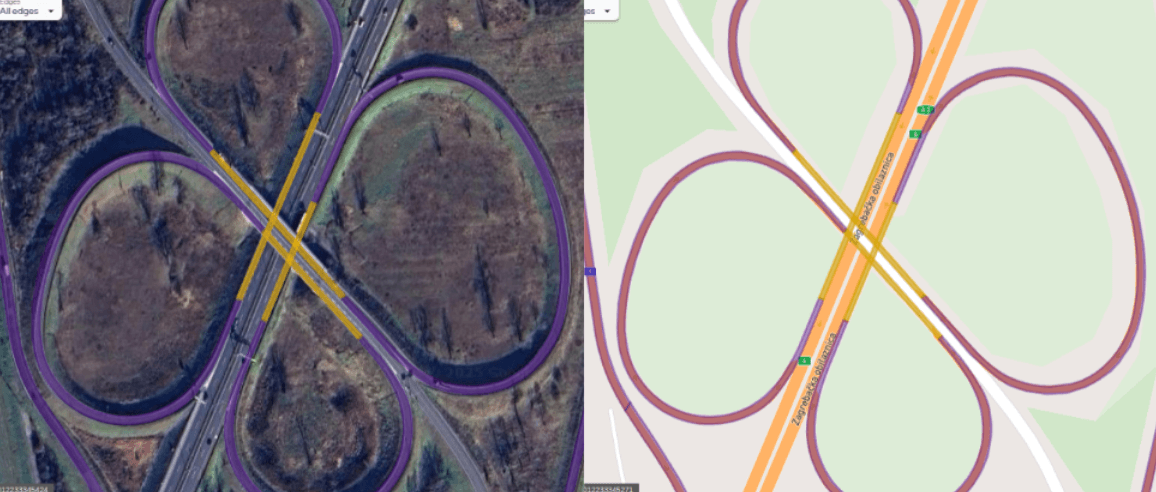
At what length can a ramp be considered a Long RAMP case?

In a suicide lane case where there is a visible gap in the lane marking and continue onto the suicide lane, what is the best approach for the accuracy of polygon marking?

When there is no Road Edge (RE) or Lane Mark (LM) data available as a guide for accurate tagging, and we rely on the background or what is visible on Google Maps (GM), what is this method called?
When tagging for neighbor attributes, is it acceptable to overlap polygons? If so, what is the limit on the number of polygons that can be overlapped?
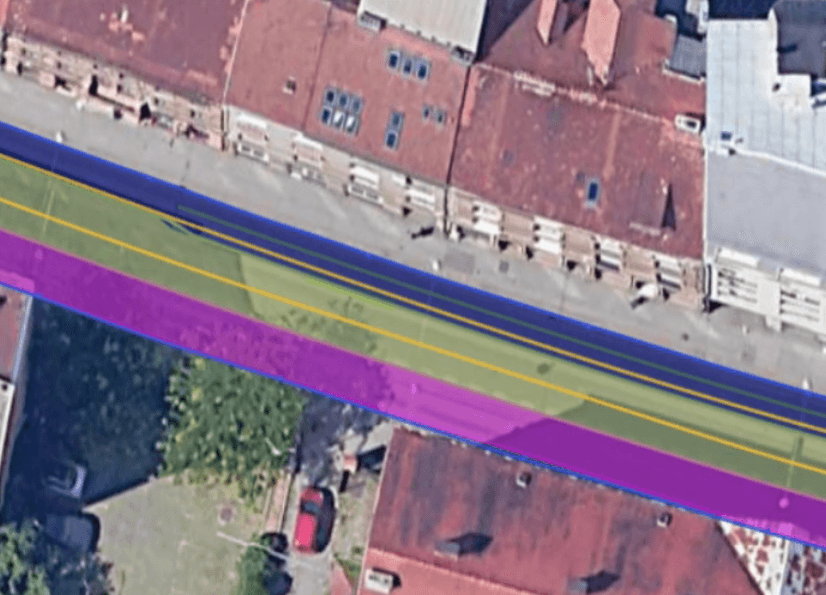
In the scenario shown in the picture, which Lane Type attributes should be applied when tagging this case?

In the scenario shown in the picture, which Lane Type attributes should be applied when tagging this case?
In the scenario shown in the picture, which Lane Type attributes should be applied when tagging this case?

In the scenario shown in the picture, have all tags from the second iteration been correctly applied to this case?

In the scenario shown in the picture, which Lane Type attributes have been applied in this case?
